Video Transcript:
Hi, I’m Bob Rice. And we’re going to be continuing our discussion of level control. In part two of this three-part installment. Let’s review where we started from, we have a tank. And inside this tank, we have a level, we are trying to control the liquid level in this tank, and we’re controlling it by adjusting the pump speed. On the exit side, we have multiple disturbances that are coming into the tank. And what we talked about in the first video, was how the control objective helped us define what we were looking to do and what the arrest time was of the system. In this video, what we want to talk about is how to actually understand the behavior of the dynamics of the system. I’m going to show you how to do a very quick by hand approximation to calculate the model parameters for level controller that you can use in the next installment on how to calculate tuning values. Specifically, what we’re after are two parameters, what are known as the integrator gain, and the dead time, the integrator gainis the how far and how fast component of the behavior, the dead time is the how much delay.
If you recall from some of the earlier videos that we had produced, on the first order model, we talked about a self-regulating process having a process gain time constant and dead time. And those models apply to things like flow and heat exchangers and so forth. But when we’re talking about level controllers, we actually have to use a slightly different model. And so there’s a different method for calculating these. And there are numerous methods for doing this, you can use software to generate models, and you can do these by hand approaches. This is just one way to calculate these model parameters, I find this to be the easiest way to do it. Because this can be done in an open loop. And essentially, what you do is you start your controller output in manual at some value.
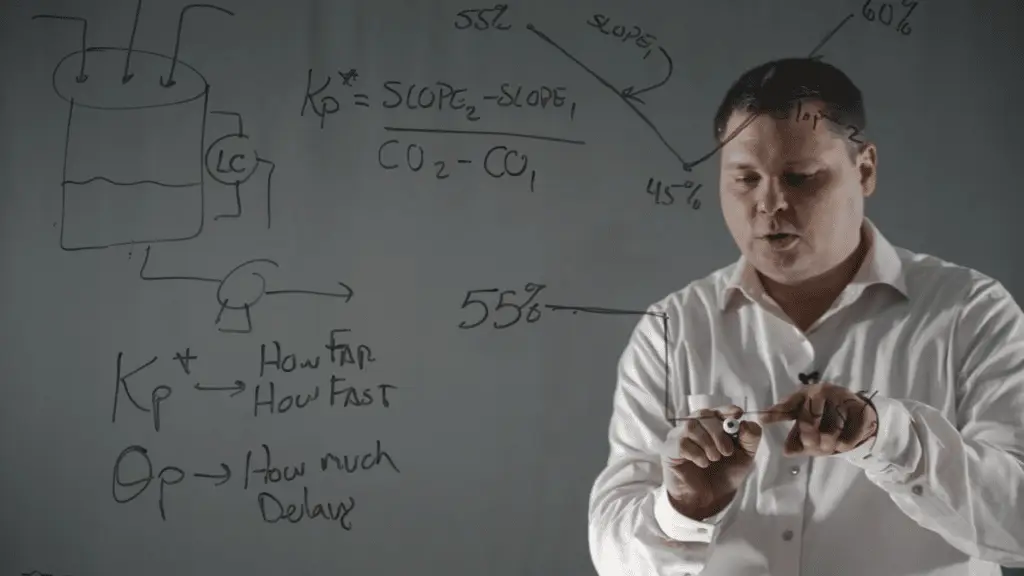
So I’m going to say my controller output is going to start at 55%, then I’m going to go ahead and close the valve to 45%. And what I’m going to be doing is monitoring the level during that change. So let’s say the level starts at 55% tank level, and it starts to drop. And then when we changed it, it eventually starts to go back up. And it got all the way down to say 45% here, and it got up to about 60% here, right? And so this is the level of the tank, it started to go down because we increased the pump speed, then we actually changed the output. So the level started to go up, we decreased the pump speed it. Now to calculate this integrator gain and dead time, what we want to do is calculate the slopes of these two lines. So the integrator gain is the slope to minus slope. One, this is the slope to here, this is slope one. Right here, we divide that by the difference in the controller outputs controller output two minus controller output one. So this is controller output two. This is controller output one. All right. So how do we calculate the slope of a line? Well, we go back to our algebra days, right or geometry days sloped to its rise over run, how far did it go? Right? So we go 60 minus 45 divided by the time it took to get there. So let’s just say this took 10 minutes. This one here took five minutes. So 60 minus 45. That’s the slope of this line divided by 10 minutes. All right, and so we get 15% divided by 10 minutes, which is 1.5% per minute. We calculate the slope of line one up here. And so we do the same thing. We do 45 minus 55 divided by the slope time here, which is five minutes, right? So we get negative 10% divided by five minutes, or in this case, negative 2% per minute. Okay, so slope to minus slope, one, slope to slope one, plug them into our wonderful equation right here. So we go 1.5% per minute, minus a negative 2% per minute, divided by the difference in the controller outputs 45 minus 55. So 45 minus 55.
Right, so, two negatives equal a positive. So we’re gonna finish our math down here. So we got 3.5% per minute, divided by negative 10%. Okay, now finish the math right here, you get negative point three 5% per minute, per percent CO, this is your integrator gain. What this number represents is the rate of change of the level when you move off the balancing point. Right, that’s all that it represents, for every 1%, I move off the point of the output that causes the level the balance in the tank, every 1%, I move up, and my level will drop negative sign, point three 5%, every minute. So in one minute, if I move the output 1%, above the balancing point, above the balancing point means I’m pumping out more than I’m pumping in, that means the level is going to drop negative sign, point three 5% For every minute. So in one minute, I’ve dropped point three 5%. In 10 minutes, I’ve dropped 3.5%. Right. And so it’s telling you how far and how fast you’re going how sensitive you are. Ideally, this number should be small. Because if this number is large, that means every small change you make in the tank can cause the liquid level to move wildly. Have you ever tried to control high flow situations in a very low volume tank, like if you’re trying to control the liquid level inside a 55 gallon drum, and you have flow rates of 50 gallons per minute? That’s a challenging process, right? Because there’s so much volume going through, it has to be very quick. So generally, you want this number to be pretty small.
That’s the how fast the dead time is very similar to how we calculated it earlier. When did you change the output? How long did it take for the level to actually kind of change direction, the difference in those is your dead time. In most cases, this number is going to be pretty small for level control, right? You open the flow, the level is going to start to change relatively quickly. So you’re gonna see this number be less than a minute, maybe five seconds, maybe a couple of minutes for large tanks, right. But for most cases, the dead time is pretty small, right? But the KP star is really the important value. This is the integrator gain. This is going to be used in the tuning calculations that we’re going to be covering in the next installment. In this installment, we covered the basic procedure for how to calculate the integrator gain. From open loop step test data where we held the output constant, let the level drift we change the output so it drifted in the other direction. We reviewed the slopes. And we use this formula to help us understand how far and how fast the level changes when we move the controller output. Thank you
If you have a particular topic or an idea that you would like us to cover, please email us at askus@controlstation.com. Thank you, and I hope you enjoy this video series.