Why Steady-State Tuning Falls Short in Live Production Environments
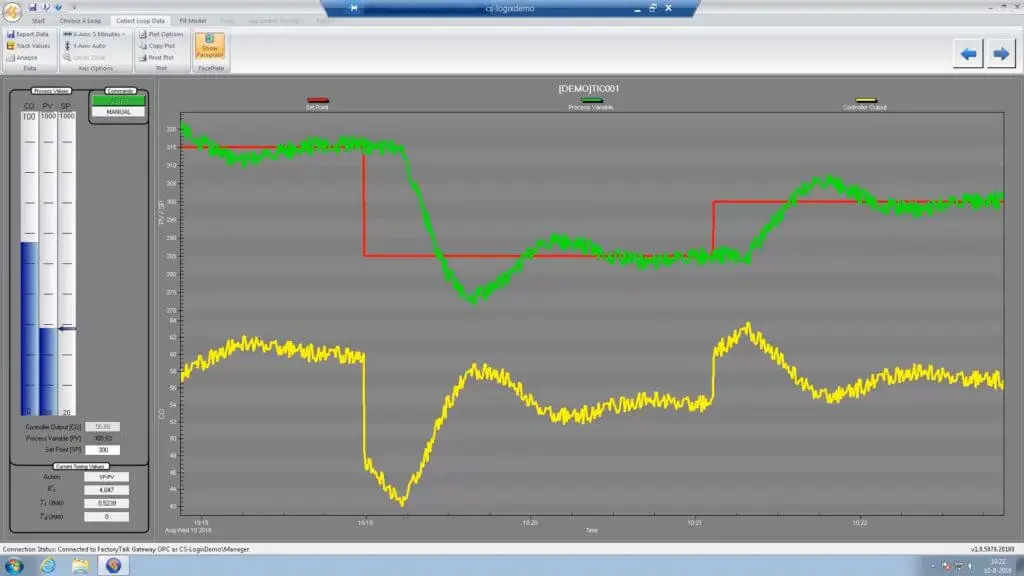
Tuning PID Loops for Disturbance Rejection
Taking Control: Disturbance Rejection Checklist
Enter your details and we’ll send benchmark results comparing your plant against data from 150+ production facilities.
"*" indicates required fields
Δ
Enter the destination URL
Or link to existing content